南加州大学维特比工程学院的研究人员创建了一个新的机器人系统
随着机器人越来越多地与人类合作——从疗养院到仓库再到工厂——它们必须能够主动提供支持。但首先,机器人必须学习一些我们本能知道的东西:如何预测人们的需求。
考虑到这一目标,南加州大学维特比工程学院的研究人员创建了一个新的机器人系统,可以准确预测人类将如何建造宜家书柜,然后伸出援助之手——提供完成任务所需的架子、螺栓或螺钉. 该研究于 2021 年 5 月 30 日在国际机器人与自动化会议上发表。
“我们想让人类和机器人一起工作——机器人可以通过执行辅助任务来帮助你更快更好地完成任务,比如取东西,”该研究的主要作者 Heramb Nemlekar 说。“人类仍将执行主要动作,但可以将更简单的次要动作卸载给机器人。”
Nemlekar,博士 计算机科学专业的学生,由计算机科学助理教授 Stefanos Nikolaidis 指导,并与 Nikolaidis 和 SK Gupta 共同撰写了这篇论文,SK Gupta 是航空航天、机械工程和计算机科学教授,拥有史密斯国际机械工程教授职位。
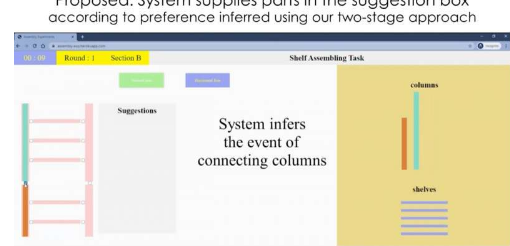
图片来源:南加州大学
适应变化
2018 年,由新加坡研究人员创造的机器人以学会自行组装宜家椅子而闻名。在这项新研究中,南加州大学研究团队的目标是专注于人机协作。
结合人类智能和机器人力量有优势。例如,在工厂中,人类操作员可以控制和监控生产,而机器人则执行繁重的体力工作。人类也更擅长那些繁琐、精细的任务,比如扭动螺丝以使其适合。
要克服的关键挑战:人类倾向于以不同的顺序执行动作。例如,假设您正在建造一个书柜——您是先处理简单的任务,还是直接处理困难的任务?机器人助手如何快速适应人类伙伴的变化?
“人类可以口头告诉机器人他们需要什么,但这效率不高,”尼古拉迪斯说。“我们希望机器人能够根据一些先验知识推断出人类想要什么。”
事实证明,机器人可以像我们人类一样收集知识:通过“观察”人,观察他们的行为。虽然我们都以不同的方式处理任务,但人们往往会聚集在少数占主导地位的偏好周围。如果机器人可以学习这些偏好,它就可以在预测您接下来可能会做什么方面领先一步。
一个好的合作者
基于这些知识,该团队开发了一种算法,该算法使用人工智能根据人们的行为将人们分为主要的“偏好群体”或类型。机器人被喂食了一种关于人类的“手册”:从 20 人组装书柜的带注释的视频中收集的数据。研究人员发现人们分为四个主要的偏好群体。
例如,您是否首先将所有架子连接到一侧的框架上?或者在移动到下一个架子之前,您是否将每个架子连接到两侧的框架?根据您的偏好类别,机器人应该为您带来一个新架子或一组新螺丝。在现实生活中的宜家家具组装任务中,人类留在“工作区”并组装书柜,而机器人——Kinova Gen 2 机械臂——学习人类的喜好,并从存储区带来所需的材料。
“系统非常快速地将新用户与偏好关联起来,只需几个操作,”Nemlekar 说。
“这就是我们作为人所做的。如果我想和你一起工作,我不会从零开始。我会看你做什么,然后从中推断你接下来会做什么。”
在这个初始版本中,研究人员手动将每个动作输入机器人系统,但未来的迭代可以通过使用计算机视觉“观察”人类伙伴来学习。该团队还在研究一个新的测试案例:人类和机器人共同建造——然后飞行——一架模型飞机,一项需要密切关注细节的任务。
Nikolaidis 说,完善系统是朝着在我们的日常生活中拥有“直观”辅助机器人迈出的一步。尽管目前的重点是协作制造,但同样的见解可用于帮助残疾人士,其应用包括机器人辅助进餐或备餐。
Nikolaidis 说:“如果我们很快就会在家中、工作场所和护理设施中使用机器人,那么机器人推断并适应人们的喜好就很重要。” “机器人需要成为队友和良好的合作者。我认为拥有一些用户偏好的概念并能够学习可将使机器人更容易被接受。”
标签: 机器人系统