用于3D超声成像的基于视觉的机器人系统
超声成像技术已被证明是诊断各种健康状况(包括外周动脉疾病 (PAD))的非常有价值的工具。PAD 是老年人中最常见的疾病之一,它会导致外周血管阻塞或变窄,从而限制了身体特定部位的血液供应。
超声成像方法由于其许多优点而成为诊断 PAD 最流行的方法之一。事实上,与计算机断层扫描血管造影和磁共振血管造影等其他成像方法不同,超声成像是无创、低成本和无辐射的。
大多数现有的超声成像技术旨在实时捕获二维图像。虽然这在某些情况下可能会有所帮助,但他们无法收集三维信息会降低他们收集数据的可靠性,增加他们对个别医生如何使用给定技术的变化的敏感性。
慕尼黑工业大学、浙江大学和约翰霍普金斯大学的研究人员最近开发了一种新的机器人系统,可以捕获高质量的 3D 超声图像。这个机器人系统在 arXiv 上预先发表的一篇论文中提出,可以让医生和医疗保健提供者使用超声技术收集更可靠的解剖数据。
迄今为止开发的绝大多数 3D 超声成像系统都不允许用户捕获单个人体四肢的整个动脉树,因为在收集数据时无法调整正在检查的对象。如果对象或肢体在数据收集过程中移动,实际上,这些系统收集的 3D 图像质量往往会大幅下降。
“为了应对这一挑战,我们提出了一种基于视觉的机器人超声系统,它可以监测对象的运动并自动更新扫描轨迹,以无缝地提供目标解剖结构的 3D 复合图像,”蒋忠良和他的同事在他们的论文中写道。
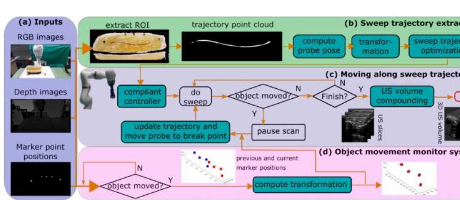
他们的机器人系统基于计算机视觉。事实上,它最初使用深度相机来提取正在检查的对象的手动规划的扫掠轨迹。然后使用该扫描轨迹来估计对象的法线方向。
研究人员在他们的论文中解释说:“随后,为了监测运动并进一步补偿这种运动以准确遵循轨迹,实时跟踪牢固连接的被动标记的位置。” “最后,进行了逐步复合。”
除了 RGB-D 深度相机外,蒋和他的同事创造的机器人系统还包括一个机器人操纵器、一个 CPLA12875 线性探头和一个超声波接口。机器人操纵器的运动可以通过团队创建的系统进行控制,该系统基于机器人操作系统 (ROS),这是一个编写机器人软件的框架。
该系统运行的软件具有三个主要组成部分,即基于视觉的扫描轨迹提取技术、自动机器人超声扫描和 3D 超声复合方法,以及运动监控系统。后者旨在更新系统提取的轨迹并校正 3D 复合。
为了评估他们创建的系统的性能,Jiang 和他的同事使用定制设计的基于凝胶的血管模型进行了一系列实验。他们的发现非常有希望,因为他们的系统能够捕获目标血管的高质量和完整的 3D 图像,即使它正在检查的对象正在移动。
研究人员在他们的论文中写道:“对凝胶体模的初步验证表明,即使扫描对象被移动,所提出的方法也可以提供有希望的 3D 几何形状。” “虽然血管应用被用来证明所提出的方法,但该方法也可用于其他应用,例如超声骨骼可视化。”
标签: