用于狭窄空间导航和攀爬的自走式软外翻环形机器人
2022-04-13 16:47:30
•
来源:
导读 导航人类无法进入的密闭空间是机器人技术的一个重要目标,也是机器人设计和控制的挑战。该任务的方法之一是同时翻转和翻转构成机器人主体的
导航人类无法进入的密闭空间是机器人技术的一个重要目标,也是机器人设计和控制的挑战。该任务的方法之一是同时翻转和翻转构成机器人主体的环形膜的两端。
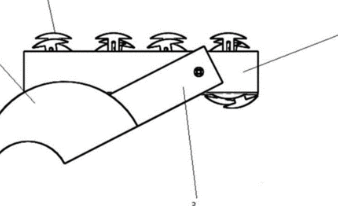
最近发表在arXiv.org上的一项研究提出了一种新型的自行式软外翻环形机器人。它使用位于机器人主体受压部分内部的电动设备不断回收充气膜。
机器人只需要一个控制信号就可以移动,并且可以顺应环境中的障碍物。研究人员证明,该机器人可以成功地在杂乱的环境中导航、穿过孔并爬上管道。它可以在垂直攀爬时支撑相当大的重量而不会打滑,并且可以通过电机扭矩进行攀爬,而与用于支撑机器人对抗其环境的力无关。
有许多人类无法进入的空间,机器人可以帮助运送传感器和设备。其中许多空间包含三维通道和不平坦的地形,这对机器人设计和控制提出了挑战。翻转环形机器人通过同时翻转和翻转其身体材料移动,有望在这些类型的空间中导航。我们提出了一种新颖的软外翻环形机器人,它使用充气膜内的电动装置推动自身。我们的机器人只需要一个控制信号就可以移动,可以适应其环境,并且可以通过电机扭矩垂直爬升,该扭矩与用于支撑机器人对抗其环境的力无关。我们推导出并验证其运动所涉及的力模型,
标签:
郑重声明:本文版权归原作者所有,转载文章仅为传播更多信息之目的,如有侵权行为,请第一时间联系我们修改或删除,多谢。