多余的虚拟机械臂感觉就像是身体的一部分
东京大学、庆应义塾大学和丰桥科技大学的研究小组开发了一种虚拟机器人肢体系统,该系统可以通过用户的脚在虚拟环境中作为额外的或多余的肢体进行操作。训练后,用户报告说感觉虚拟机械臂已经成为他们自己身体的一部分。发表在《科学报告》上的这项研究侧重于参与者的感知变化,了解这些变化有助于设计出人们可以像我们自己的身体一样自然自由地使用的真正的物理机器人多余肢体系统。
你会用额外的手臂做什么,或者如果像蜘蛛侠的克星章鱼博士一样,你可以多做四个?对额外或多余的机器人肢体的研究着眼于我们如何在精神上和身体上适应在我们的身体上增加额外的肢体。
东京大学先进科学与技术研究中心 (RCAST) 的博士生 Ken Arai 对这项研究产生了兴趣,以此来探索人类“可塑性”的极限——换句话说,我们的大脑改变和适应的能力到外部和内部的变化。可塑性的一个例子是我们可以学习使用新工具的方式,有时甚至将它们视为我们自己的延伸,被称为“工具体现”,无论是艺术家的画笔还是美发师的剪刀。
为了在实践中探索这些概念,东京大学、庆应义塾大学和丰桥科技大学的团队合作创建了一个虚拟机器人肢体系统。然后,他们要求参与者使用虚拟肢体在虚拟现实(VR)中执行任务。
参与者从第一人称视角观察机械臂,同时用脚移动它们以触摸红球。学分:Ken Arai(抄送)
“我们研究了虚拟机械臂作为多余的肢体,是否可以被视为自己身体的一部分,以及机械臂周围的近端空间是否会发生知觉变化,”Arai 说。
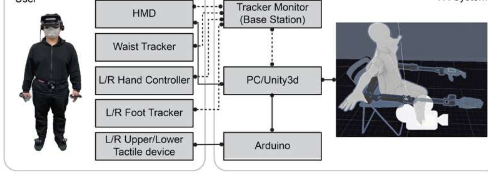
参与者佩戴头戴式显示器,让他们以第一人称视角看到自己在 VR 中的手臂,以及额外的虚拟机械臂。然后,他们必须只使用虚拟机械臂来执行任务,这些机械臂是通过移动脚趾来控制的。当虚拟机械臂接触到一个物体(如虚拟球)时,触觉设备会将感觉从虚拟机械臂传回脚尖和脚底。
一旦参与者学会了如何使用虚拟系统,他们报告说感觉虚拟机械臂已经成为他们自己的额外手臂,而不仅仅是他们真实手臂或脚的延伸。“对于‘身体所有权感’、‘代理感’和‘自我定位感’,主观评价的得分在统计学上显着提高,这些是体现的重要措施,多余的机器人肢体能够成为其中的一部分。身体,”新井说。
该团队还发现,参与者的“个人空间”(我们认为是我们的个人空间的身体周围区域)扩展到包括虚拟机械臂周围的区域。正如 Arai 解释的那样,“我们成功地捕捉到了额外机器人肢体周围视觉触觉整合的感知变化(周围空间)与感觉一个人的手臂数量增加的主观评价分数变化(额外肢体感觉)之间的正相关关系。 )。”
接下来,该团队希望研究参与者自己的手臂在虚拟现实中与虚拟机械臂之间合作行为的潜力。“从认知神经科学的角度研究这里报道的额外肢体感觉的机制和动力学对于探索人类可塑性极限和额外机器人肢体系统的设计非常重要,”Arai 说。希望通过了解在 VR 中操作一个多余的机器人肢体系统所需的感知变化和认知努力,这将有助于设计未来人们可以像自己的身体一样自然使用的现实生活系统。
标签: