用导电墨水绘制电路以求生存的机器人
最近的技术进步为创建越来越复杂的机器人系统铺平了道路,这些机器人系统旨在在不同的熟悉和不熟悉的环境中自主完成任务。旨在在不确定或偏远环境中运行的机器人可以从主动从周围环境获取电力的能力中受益匪浅。
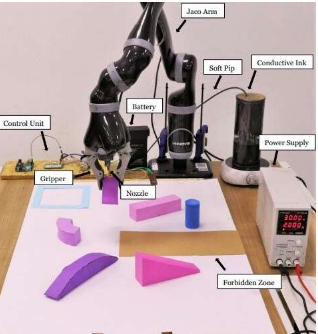
伍斯特理工学院、伦敦帝国理工学院和伊利诺伊大学厄巴纳香槟分校的研究人员最近开发了一种新的机器人系统,该系统可以在视觉上重新排列其周围环境,以从给定的电源中接收最大量的能量。该机器人在arXiv上预发表的一篇论文中发表,并将在IEEE机器人和仿生学国际会议上发表,其工作原理是使用导电墨水绘制电路。
“我们的PLOSONE工作始于一项非常哲学的思想实验,”进行这项研究的教授安德烈·罗森多告诉TechXplore。“尼采声称人类的原始本能是力量,而生存只是我们无法达到最终目标的必要条件。基于这个想法,我们开始设计实验环境,让我们的机器人不仅可以行动以生存,而且茁壮成长。”
在他们针对这一主题的第一项研究中,安德烈·罗森多、谭翔龙和吕伟杰试图设计一种仅通过绘制电路就可以为自己供电的系统。在他们的新工作中,他们将该电路打印系统与机器人抓手相结合,创造了一个机器人,该机器人可以执行一系列旨在从其环境中获得更大功率(即更高电压)并因此在不利环境中生存的动作。
该团队在模拟不同的现实世界场景中测试了他们的机器人,包括它必须避开物理障碍物或会中断其绘制电路的区域的任务。然后,他们还在现实环境中测试了机器人,以进一步评估其能力。
“我们的机器人每次实验都用一块电池开始,它的能量源随着它的移动而减少(我们也‘泄漏’它以模拟由于体内平衡造成的自然能量损失),”学生谭向龙解释说。“机器人经历了一系列虚拟训练集,一个红色端子(VCC)需要连接到靠近其身体的另一个红色端子,一个黑色端子(Ground)需要与黑色端子相匹配,以便当前可以流向它的电池。”
为了防止他们的机器人简单地沿简单的直线移动,Rosendo和他的同事在模拟和现实世界的试验中都在其周围添加了障碍物。其中一些障碍物,例如泡沫立方体,可以很容易地被机器人移除,而其他障碍物则连接到一个接地板上,当电路接触到它时,该接地板会“吸走”电力。
研究小组发现,他们的机器人快速有效地学会了克服这些障碍,以生存并最大限度地利用接收到的能量。这意味着重新布置周围环境中无法进入的障碍物或桥接区域。
“我认为我们正在朝着机器人的适应性行为迈进,”罗森多说。“人类能够适应、调整他们的行为以适应新情况所需的行为,并随着他们知识的成熟而逐渐提高。我们可以谈论运动、任务甚至太空任务:在成为我们游戏的佼佼者之前,我们会花我们的时间最初努力了解新规则,然后改进和超越。如今的机器人努力克服故障,学习适应以保持自己的功能是他们应该模仿我们的技能。
由罗森多和他的同事创造的自适应机器人可能具有许多优势,因为它可以自主地最大化周围环境的能量,并通过创建新的电路来持续保持自身功能。在未来,这项最近的工作可能会激发其他机器人系统的发展,这些机器人系统可以在复杂的环境中生存和发展,而无需新的电路或人工监督。
Tan补充说:“我们现在正在考虑在我们的工作基础上采取下一步措施,并让这个实验保持有趣,例如使任务复杂化并设计一个‘电池更换’系统,以使实验更加现实。”
标签: