通过自主对抗疲劳制造的人机协作
随着自主性和机器人技术的不断进步,人类和机器人可能很快就会共享一些相同的目标和制造空间。德克萨斯 A&M 大学的研究人员正在分析他们如何能够协同工作,让一方在另一方暂时缺乏的地方站出来。
首席研究员兼博士生 Sarah Hopko,Wm Michael Barnes '64 工业与系统工程系副教授 Ranjana Mehta,前研究生 Riya Khurana 和 J. Mike Walker '66 系教授 Prabhakar Pagilla机械工程,正在研究在具有大量重复性工作的制造环境中人类与自主辅助之间的相关性。他们希望确定如何对机器人进行编程,以可靠的方式在人类疲劳期间介入。
人类以相对较低的成本带来了对生产线的灵活性和高度理解。但由于人类的身体和认知能力有限,他们会感到疲倦,并在繁重的工作任务中犯错。在人类可能缺乏继续的能力的地方,机器人可以帮助监督任务中更重复的部分,根据应用举起更重的物体或施加力量。
“越来越多的人意识到,人机协作是一种可行的解决方案,可实现生产自动化或为构成困难或代价高昂的障碍的问题提供解决方案,”Hopko 说。
本研究的目标是了解特定的人为因素(例如疲劳和信任)如何相互作用,以确保协作机器人的设计考虑到操作员的行为和需求,从而涵盖所有基础。
“我们不希望操作员因为他们的疲劳状态和过度依赖机器人增加的辅助而灌输错误的安全感。我们也不希望操作员在其他适当的情况下使用机器人辅助不足, “霍普科说。“协作机器人在某种程度上是操作员的队友。”
在与工作中的队友合作时,识别参与度或疲劳程度都可以通过感知或简单的对话来完成。然后,您可以根据收集到的信息确定如何最好地帮助您的队友。Hopko 说目标是人机交互是相似的。
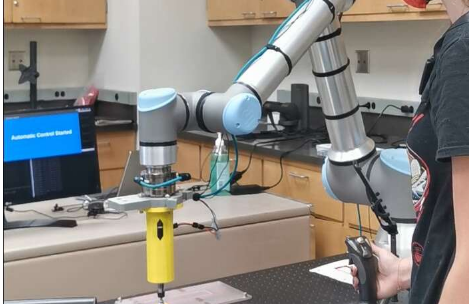
研究团队进行了一项多会话实验,其中男性和女性在不同的认知疲劳状态下使用不同级别的机器人辅助,结合优傲机器人 (UR10) 协作机器人执行金属抛光任务。参与者在执行制造任务前一小时使用具有挑战性的视觉空间工作记忆任务感到疲劳。
通过可穿戴生理监测评估每位参与者的疲劳、情境意识和工作量,以确定三个任务绩效指标:任务效率、准确性和精确度。
总体而言,研究小组发现,通过提高辅助水平可以提高操作员的表现,并且增加的辅助可以恢复认知疲劳。
认知疲劳和自动化水平会影响不同的绩效结果。疲劳影响了参与者的效率。虽然准确度和精确度没有受到影响,但他们完成任务需要更长的时间。
Hopko 说:“我们还发现,女性参与者报告说,利用高度自动化带来了更大的绩效收益,而男性参与者尽管表现出类似的任务表现,但并未从帮助中获益。”
随着越来越多的行业在其工作流程中采用协作机器人,这一发现对于随着工业 4.0 的进步而对机器人技术的接受度是独一无二且重要的。
虽然提高表现和疲劳恢复是机器人辅助的突出好处,但它也表明,更高的支持通过减少参与者的任务参与和精神刺激来降低他们的情境意识。
较低的情境意识会导致安全问题。因此,更高水平的自动化保证提高对操作员疲劳状态的适应性,同时确保人机交互。
在心率变异性信号和主观测量中观察到的情况意识和自动化之间也存在很强的相关性。
“这些发现凸显了可穿戴设备在帮助操作员向机器人传达关键信息方面的潜力,”Hopko 说。
最终,更大的机器人辅助能够提高准确性和效率水平,但不能提高精度。考虑人为因素(例如操作员性别及其认知状态)与机器人因素对协作性能之间的相互作用,可以改进人机协作系统设计。
“我们希望有操作员和机器人之间的合作,是因为强大的通过悄悄地提供这方面的知识,以机器人在流畅的人-援助扰动因素机器人适应的过程,” Hopko说。
标签: 对抗疲劳