通过傅立叶变换增强干扰观察器控制器的能力
韩国国立海洋大学和韩国延世大学的科学家将基于模糊干扰观测器的控制理论与傅立叶变换相结合,设计出一种可以处理非周期性、非线性干扰的控制器。这一特性使他们的方法适用于动态现实世界系统,如无人机,这些系统必须处理非周期性干扰,如风和空气阻力的变化。
随着现代社会的进步,自动化系统变得越来越复杂,设计先进可靠的控制器的重要性突飞猛进。控制器监控系统变量并确保流程和机器在定义的范围内稳定运行。
在过去的20年里,基于干扰观测器控制(DOBC)理论的控制器变得越来越流行。这些控制器测量影响系统的外部干扰并根据需要对其进行补偿以保持系统稳定。然而,该理论的现有实现只能管理周期性扰动,这极大地限制了它们的适用性——在现实世界中,扰动可以有多种形式,并且通常是非周期性的。
在最近发表在IEEEAccess上的一项研究中,两位韩国科学家通过一种创新方法解决了这个问题:将DOBC理论与称为傅立叶变换的强大数学工具相结合。
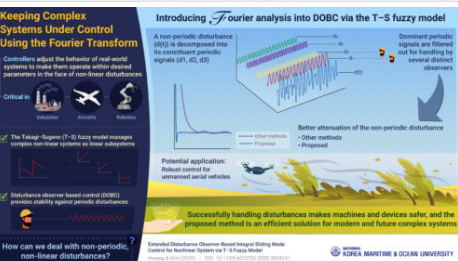
韩国国立海洋大学的HanSolKim博士解释了他们的推理:“傅立叶变换可用于将非周期性扰动表示为无限周期扰动的总和。然后,通过仅选择最主要的周期性干扰,我们可以设计不同的DOBCs来补偿每个干扰。”
为了实现这一目标,科学家们从Takagi-Sugeno模糊模型开始,这种方法将复杂的非线性系统——描述了许多现实世界的动态系统——表示为线性子系统。通过将这种模糊建模方法的略微修改版本与DOBC理论相结合并应用傅立叶变换,他们设法设计了一个控制器,与其他最先进的方法相比,它具有更好的响应,如模拟所示。
这种控制器设计对于现代技术系统特别有用,例如无人驾驶飞行器(UAV),通常称为无人机。无人机的性能在很大程度上取决于它们自动处理外部干扰的能力,例如风和空气阻力的变化。对此,金博士表示:“如果不对干扰进行适当补偿,无人机可能会造成事故、伤害人员和破坏财产。我相信我们的方法将成为无人机系统的有效解决方案,因为它可以保证对干扰的鲁棒性能。”
到目前为止,他们的方法纯粹是理论上的,但他们计划在不久的将来在真正的硬件平台上实现它。如果一切顺利,我们可能就有了一种新的有效方法来控制我们的机器。
标签: